Giving the C-Bot’s Octopus some glasses
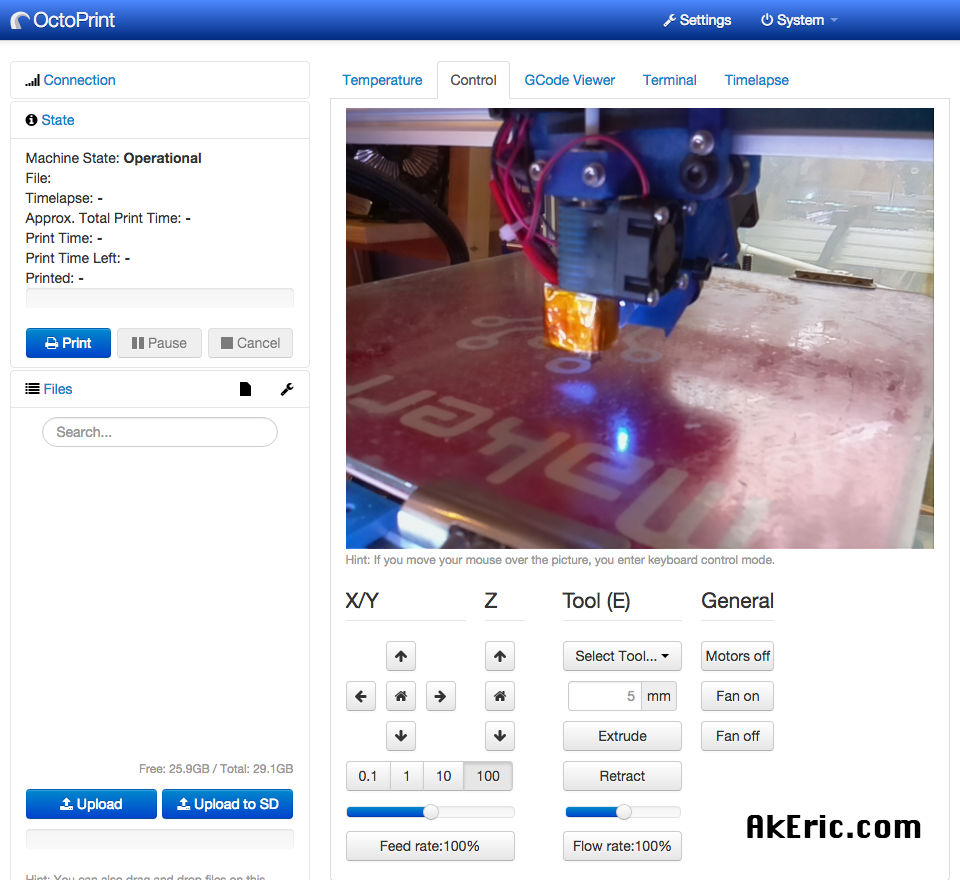
I recently got OctoPrint working on my C-Bot. It’s been pretty nice to remote-login and check my prints (and an emergency shutdown once during a jam). One of the last remaining issues has been the quality of the timelapse video.
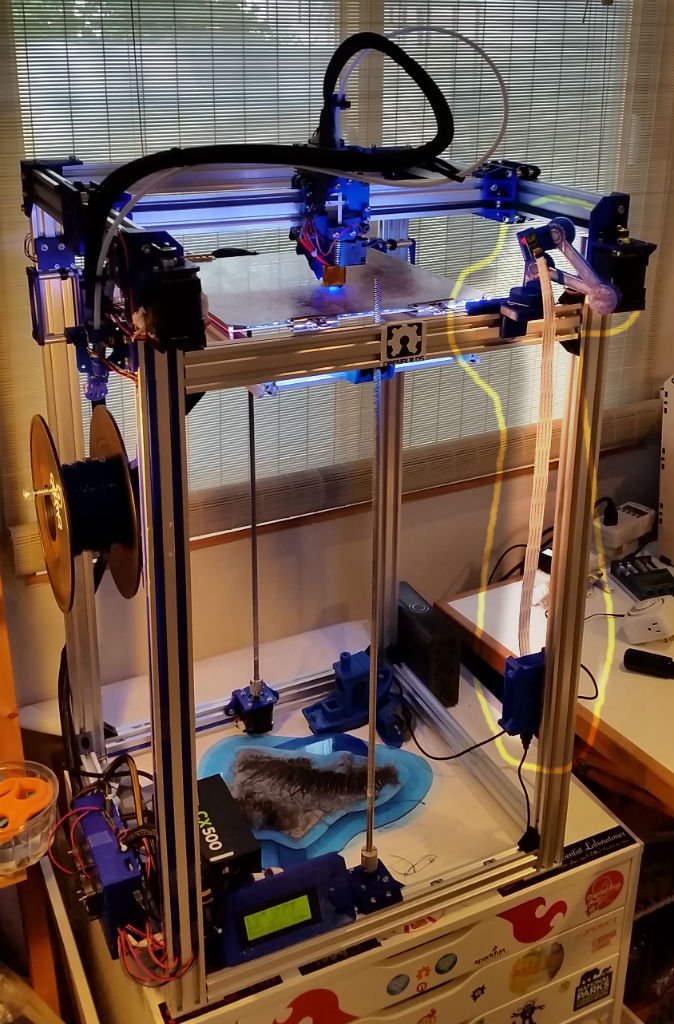
I’m using a Raspberry Pi camera module, and based on where I’ve mounted it (front top cross-member of the bot), plus the size of my build platform (12″ square), it prefers to focus on the rear of the platform, rather than the middle. The effect is that anything from the middle to the front comes out blurry.
I’d read on the forums that you can use a pair of +2 reading glasses to pull that focal-distance closer, so I trekked to Walgreens today and picked up three pairs for $10 (It was 3 for the price of one): I got these values to test: +1.25 (they were out of +1.5), +2, +2.5.
After popping them out of the frames, based on testing, it looks like the +2.5 increased the quality the best: I was immediately able to see fine detail at the middle and front of the build platform.
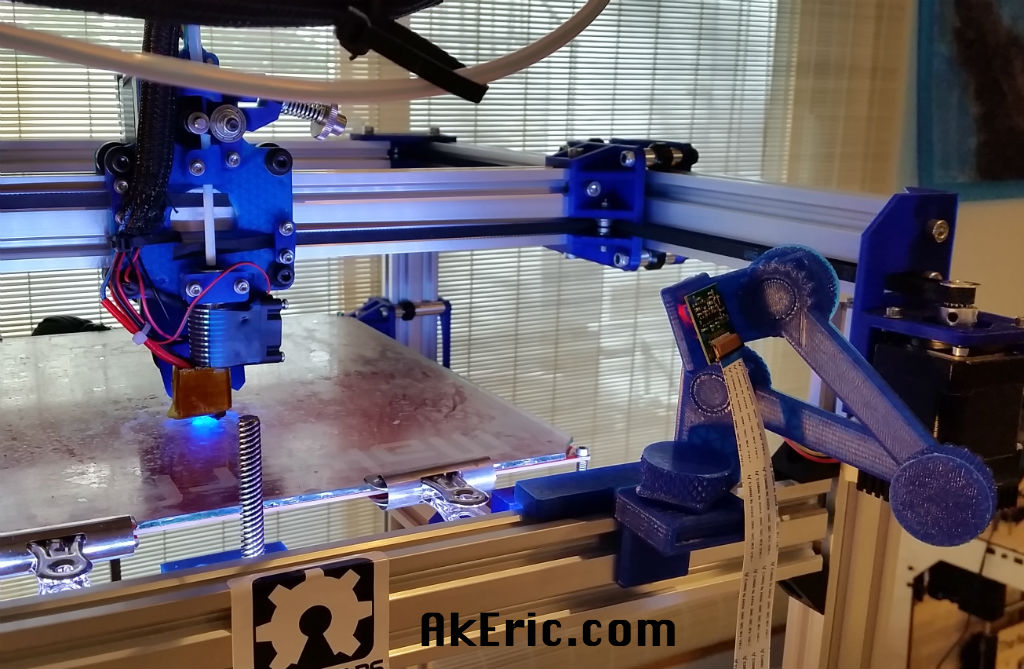
But how to mount? The pi_cam_head_v2.stl file sure wasn’t modeled to support reading glasses. Hot glue to the rescue (aka, manual 3d printing) :
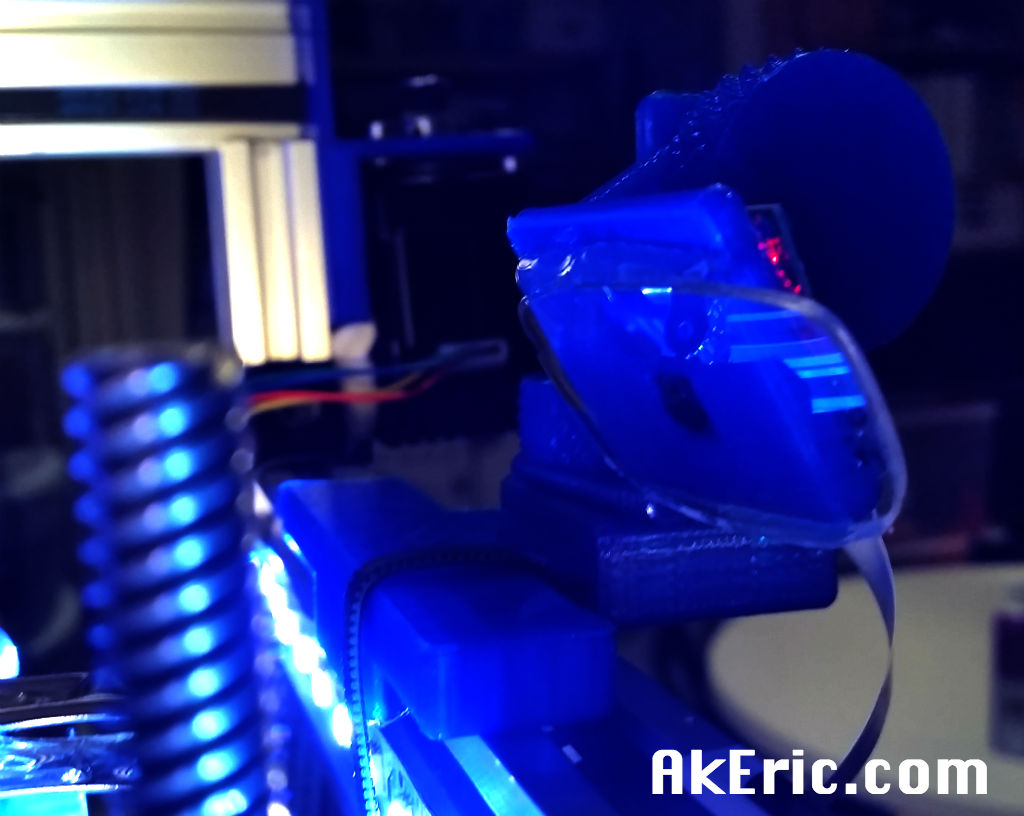
View is from the right-front corner of the build-platform, with the front leadscrew in-frame.
Making sure to first clean it really well, and center it on the camera itself, I simply ran a bead of hot-glue along the top and bottom edge of the lens, .
The only easy way to tell the difference is to compare the timelapse vid’s I’ve made to date:
- First vid ever, low-res, low quality encoding, out of focus: Eiffel Tower
- Second vid, 720p HD, higher quality encoding, out of focus: Big Christmas Reindeer
- Third vid (shot today), 720p HD, same high quality encoding, in focus: Small Christmas Reindeer
Only place to go from here is to mess with the encoding more, see if I can bring that quality up, and possibly get a fish-eye\wide-angle lens for it.